In this article we will try to implement 3D reconstruction from multi-views of human pose on a calibrated system. We already detected the position of the 25 joints store in txt files, to do that we use a deepnet OpenPose which also give a reliability score.
Read the 2DTXT file and draw the keypoints on original video
Each line of the 2DTXT is a frame and lines look like this (r is the reliability score, x is coordinate on X, y is coordinate on Y) : xJ1 yJ1 rJ1 xJ2
yJ2 rJ2 xJ3 yJ3 rJ3....... xJ25
yJ25 rJ25 .
I did this code :

And obtain this result (which is what we want) :
Read the 3DTXT file and draw the keypoints on original video
For this one we have access to a given code by our teacher and the 3DTXT files gives only 15 joints this time :

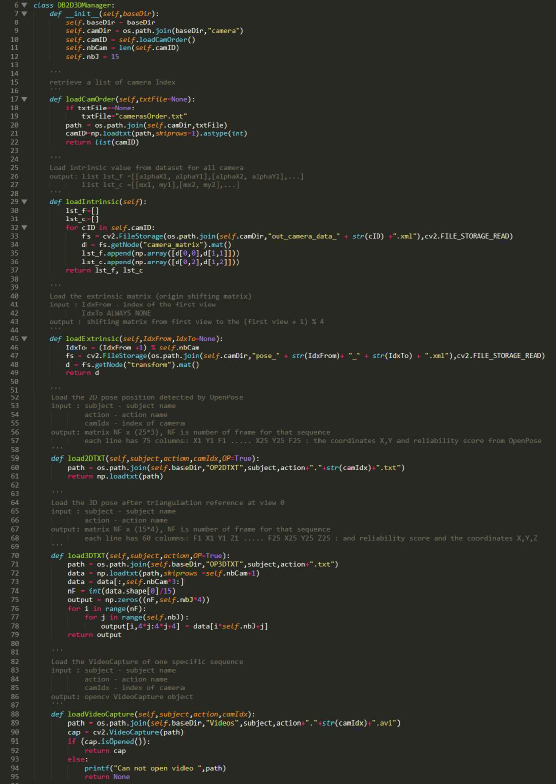
Some explanation :
- Create an instance of our object (dbMan) using the folder where data are, our subject and its action.
- Origin shifting matrix : P01 P12 because we work in 3D this time.
- Read dataset for all camera into two lists.
- Load the 2D pose & the 3D pose using the txt files.
- Open the original video
- Some checks all things are good.
- Inside the loop [for each frame] :
- write in a file (for us it's a video)
- [for each point]
- calculate the position of points using the shifting matrix
- draw them on the video
- Release everything
And what we obtain is this :